工业机器人的分类按机械结构分类介绍(PPT 22页)
所属分类:机械行业
文件大小:1425 KB
下载要求:10 学币或VIP
点击下载
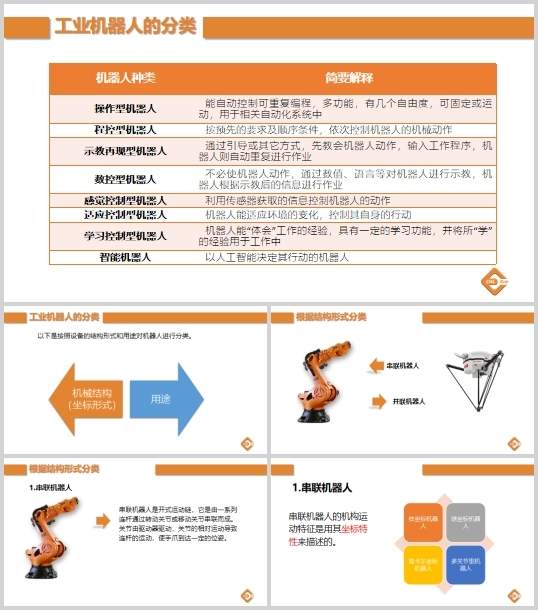
串联机器人是开式运动链,它是由一系列连杆通过转动关节或移动关节串联而成。
关节由驱动器驱动,关节的相对运动导致连杆的运动,使手爪到达一定的位姿。
串联机器人的机构运动特征是用其坐标特性来描述的。
1.串联机器人――⑴柱坐标机器人
当水平臂或杆架安装在一垂直柱上,
而该柱又安装在一个旋转基座上,这种结构可称为柱坐标机器人。
其运动特点如下:
手臂可伸缩(沿r方向)
滑动架(或托板)可沿柱上下移动(z轴方向)
水平臂和滑动架组合件可作为基座上的一个整体而旋转(绕z轴)
球坐标机器人的空间位置分别由旋转、摆动和平移3个自由度确定。
由于机械和驱动连线的限制,机器人的工作包络范围是球体的一部分。
其工作特点如下:
手臂可伸出缩回范围R,类似于可伸缩的望远镜套筒
在垂直面内绕β轴旋转
在基座水平内转动角度为
..............................
精品资料网 m.cnshu.cn
Copyright © 2004- 粤ICP备10098620号-1
