乐高机器人之齿轮篇(DOC 30页)
所属分类:智能制造
文件大小:570 KB
下载要求:10 学币或VIP
点击下载
2.1简介
2.2齿数的计算
2.3加速和减速传动
2.4齿轮传动机构
2.5涡轮
2.6离合齿轮
2.7齿轮的配合
2.8.1滑轮和皮带
2.8.2链条
2.8滑轮、皮带、链条的使用
2.9差速器
8.1简介
8.2.1直线运动
8.2简单的差动装置
8.3搭建双差动装置
8.5搭建转向装置
8.6搭建一个三轮装置
8.7搭建同步驱动装置
8.8其他结构
图8.16无滑差动机构
图8.9双差动装置剖面图
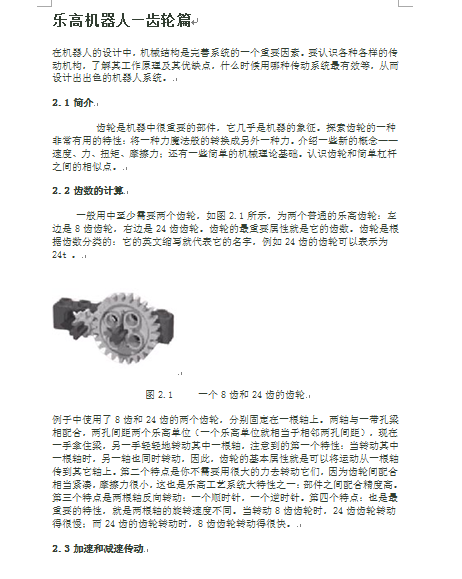
图2.1一个8齿和24齿的齿轮
图2.10对角线配合
图2.11垂直配合的斜齿轮 图2.1220齿斜齿轮
图2.13垂直配合的冠齿轮 图2.14双面斜齿轮
图2.15垂直配合的双面斜齿轮
图2.16滑轮
图2.17皮带与滑轮连接
图2.18滑轮长距离传递运动
图2.19链条
图2.21:5传动比
图2.20相连的两个轮子做直线运动
图2.21转弯时两只轮子行走的距离不同
图2.22差速器的简单的应用
图2.39:1的传动比
图2.4涡轮装置
图2.5离合齿轮
图2.6传动链中的离合齿轮
图2.7垂直齿轮配合
图2.816齿齿轮
图2.916齿齿轮与24齿齿轮的配合
图8.11带轮滑动掌舵装置
图8.12转向装置
图8.13另一种转向装置
图8.14阿克曼转向机构:内部轮比外部轮转弯急
图8.15移动中轴线上的轮子
图8.17三轮装置
图8.18乐高转盘
图8.19可行的轮胎同步驱动装置
图8.1简单差动装置
图8.20错误的轮胎同步驱动装置
图8.21一个完整的同步驱动装置(仰视图)
图8.22完全同步驱动器(俯视图)
图8.23全方位触动传感器
图8.2使用单个角度传感器观察左右轮速度的差别
图8.3可制动差动装置
图8.4带16齿齿轮离合器,传动操纵环,传动转变钩
图8.5小角轮结构
图8.6避免打滑的角轮
..............................
精品资料网 m.cnshu.cn
Copyright © 2004- 粤ICP备10098620号-1
