典型机器人结构示例(PPT 67页)
所属分类:智能制造
文件大小:12434 KB
下载要求:10 学币或VIP
点击下载
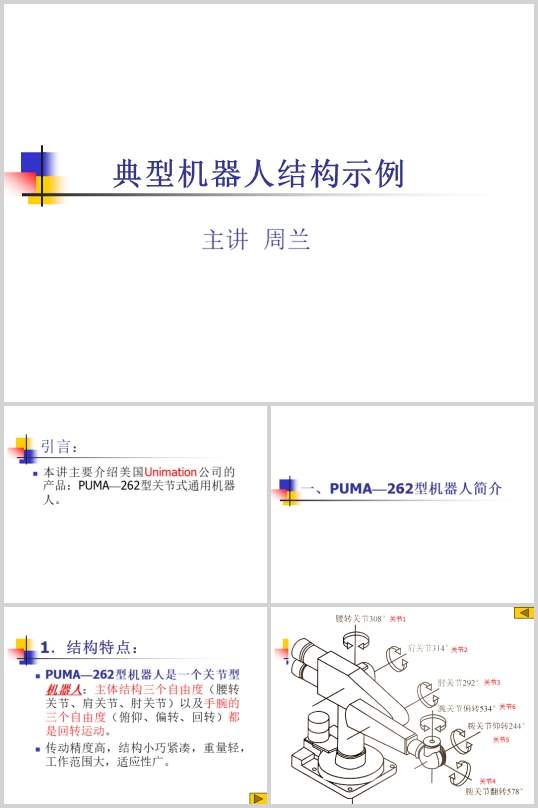
引言:
一、PUMA―262型机器人简介
1.结构特点:
PUMA―262型机器人结构图:
2.应用场合:
3.主要技术参数(1):
3.主要技术参数(2):
二、主要构成
1.立柱和基座(1):
1.立柱和基座(2):
立柱和基座图例:
2.大臂:
大臂图例:
3.小臂:
小臂图例(1):
小臂图例(2):
4.手腕:
手腕图例:
三、主要运动
1.腰转运动:
腰转运动传动原理图:
腰转运动结构图:
2.肩关节运动(1):
2.肩关节运动(2):
肩关节运动传动原理图:
肩关节运动结构图(1):
肩关节运动结构图(2):
肩关节运动结构图(3):
3.肘关节运动:
肘关节运动传动原理图:
肘关节运动结构图(1):
肘关节运动结构图(2):
肘关节运动结构图(3):
肘关节运动结构图(4):
4.手腕的俯仰运动:
手腕的俯仰运动传动原理图:
手腕的俯仰运动结构图:
5.手腕的回转运动:
手腕的回转运动传动原理图:
手腕的回转运动结构图:
6.手腕的偏转运动(1):
6.手腕的偏转运动(2):
手腕的偏转运动传动原理图:
手腕的偏转运动结构图:
四、PUMA―262机器人整体结构
1.大臂的结构图(1):
1.大臂的结构图(2):
2.小臂的结构图(1):
2.小臂的结构图(2):
3.回转基座的结构图(1):
五、典型零部件
1.弹性管联轴器(1):
1.弹性管联轴器(2):
弹性管联轴器图例:
2.电磁制动闸(1):
2.电磁制动闸(2):
电磁制动闸图例:
PT-600弧焊机器人:
PT-600弧焊机器人外形图(1):
PT-600弧焊机器人外形图(2):
PT-600弧焊机器人腰部结构图:
PT-600弧焊机器人大臂装配图:
PT-600弧焊机器人小臂结构图:
PT-600弧焊机器人碗部结构图:
PT-600机器人小臂和腕部的连接
..............................
精品资料网 m.cnshu.cn
Copyright © 2004- 粤ICP备10098620号-1
