机器人静力分析与动力学概述(PPT 48页)
所属分类:智能制造
文件大小:1839 KB
下载要求:10 学币或VIP
点击下载
第2章机器人静力分析与动力学
2.1机器人雅可比矩阵
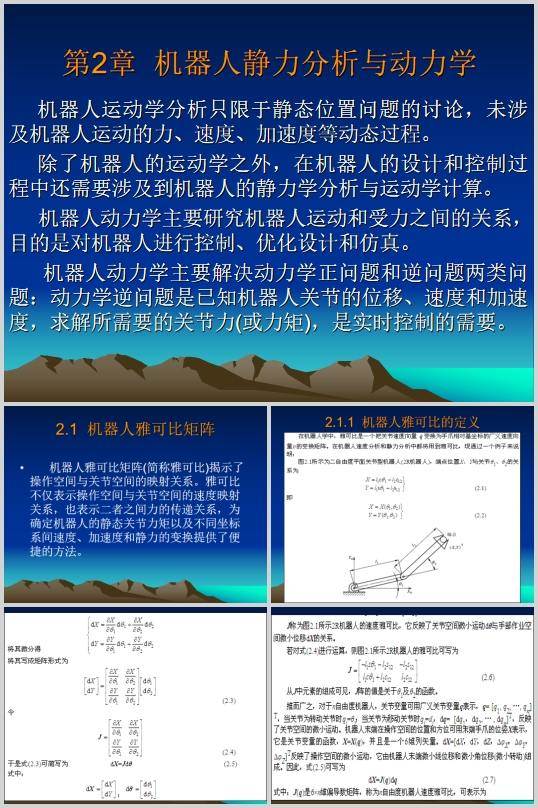
2.1.1机器人雅可比的定义
2.1.3机器人雅可比讨论
2.2机器人静力分析
2.2.1操作臂力和力矩的平衡
如图2.3所示,杆i通过关节i和i+1分别与杆
i–1和i+1相连接,建立两个坐标系{i–1}和{i}。
2.3机器人动力学方程
2.3.1欧拉方程
2.3.2拉格朗日方程
2.3.3平面关节机器人动力学分析
从上面推导可以看出,
很简单的二自由度平面关节型机器人的动力学方程已经很复杂,
包含了很多因素,这些因素都在影响机器人的动力学特性。
对于比较复杂的多自由度机器人,其动力学方程更庞杂,
推导过程更为复杂,不利于机器人的实时控制。
故进行动力学分析时,通常进行下列简化:
二、关节空间和操作空间动力学
2.4机器人的动态特性
..............................
精品资料网 m.cnshu.cn
Copyright © 2004- 粤ICP备10098620号-1
