机器人系统培训教材(PPT 104页)
所属分类:智能制造
文件大小:3583 KB
下载要求:10 学币或VIP
点击下载
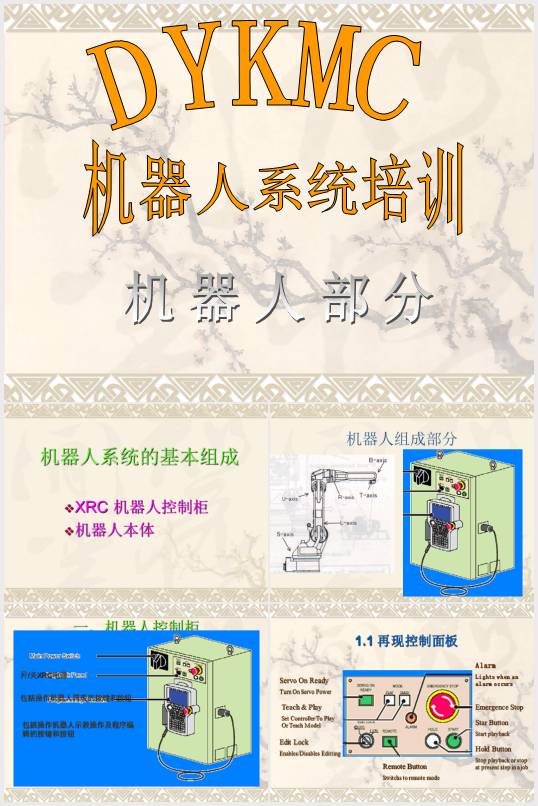
机器人系统的基本组成
机器人组成部分
一、机器人控制柜
1.1再现控制面板
1.2示教盘
1.3示教盘的显示区域
实际操作(一)
实际操作(二)
二.机器人主体
MOTOMAN-HP20
MOTOMAN-HP20技术参数
三.机器人的操作步骤及基本参数的设定
(2)接通伺服电源。
№.3轴操作。
轴节运动:
直角运动:
圆柱坐标:
用户坐标:
多种工具及用户坐标的切换:
TOOL工具参数设定
工具空间坐标的定义
工具坐标相对法兰坐标的角度定义
实例:
实际操作(三)
四示教
圆弧移动类型机器人将经过三个点,
以圆弧的方式移动。当机器人使用圆弧移动,移动指令是MOVC。
选择工具号:
实际操作(四)
5移动指令的编辑
删除移动指令:操作:
移动光标至需删除的行→按下[DELETE]→按下[ENTER]
更改移动指令位置:
更改移动指令类型:
6机器人停止与重新启动
机器人急停
机器人急停解除
实际操作(五)
7机器人程序JOB的编辑
(当使用了示教锁功能后,编辑的操作将被限制。)
删除程序
更改程序名称
程序编辑锁定
8程序内容编辑
程序内容选定:
程序内容复制:
程序内容剪切:
程序内容粘贴:
程序内容反向粘贴:
实际操作(六)
五同步文件定义
..............................
精品资料网 m.cnshu.cn
Copyright © 2004- 粤ICP备10098620号-1
